| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [INFORMATION GATHERING] | [Run-Time Variables] [Hands-off Goals] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink])
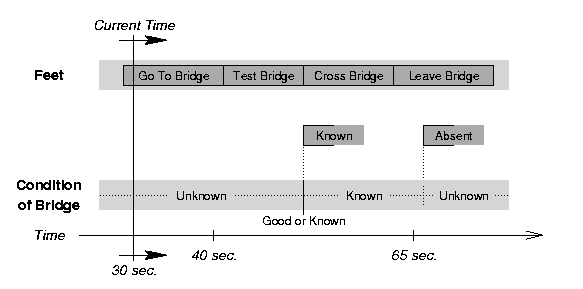
The concepts are mostly based on run-time variables, which are initialized by sensing actions. In our model, the fact of knowing a state can easily be expressed by the inclusion of Known values for state resources. These values are triggered by actions, which include the sensing of the state resource's property. The state resources' mapping mechanisms must protect already specified states from the more general Known reassignment, and allow a switch to the Known state only from Unknown states. This process does not differ from the normal state processing and does not require a special sensory treatment. In the example of the figure below, the crossing of a bridge in an Unknown state is considered to be unsatisfiable enough to include an additional Test Bridge action.
The problem of redundant sensing, which is addressed in [PUBLink] is not present here, as there is only a single plan and the state resources' information is accessible over the whole time period.
| [INFORMATION GATHERING] | [Run-Time Variables] [Hands-off Goals] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek