| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink] [PUBLink])
The SCSP of the previous sections specified a general planning problem. However, for a specific problem, additional domain information must be provided. The constraints must be able to handle the specific domain values and must have appropriate cost/goal functions and improvement heuristics, e.g., the Task Constraint must know about the permitted action configurations and the Existence Constraint must be able to project the existence confidence for the domain's Objects.
A specific planning problem can include satisfaction goals (e.g., the door is to be open at time point 2507) and optimization goals (e.g., the minimal hunger level over time is to be as high as possible). Satisfaction goals can be represented by Task Constraints that consist only of Precondition Tasks, and optimization goals can be realized by initialization of the resource constraints' goal functions.
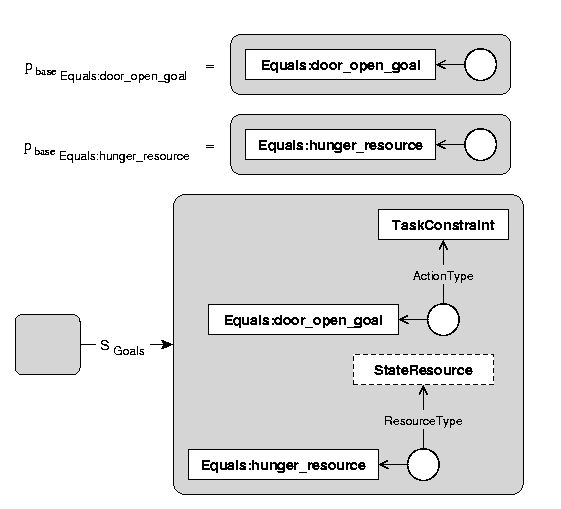
The satisfaction goals and optimization goals must be embedded in the search process. Thus, we can define additional constraints that restrict variables to a specific value (a constant) and require that these constraints exist in a solution where they, for example, restrict a Task Constraint's ActionType variables and the State Resources' ResourceType variables (e.g., see figure below).
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek