The Extensible Object Constraint Precondition Task
| EXCALIBUR Adaptive Constraint-Based Agents in Artificial Environments |
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
| [ Please note: The project has been discontinued as of May 31, 2005 and is superseded by the projects of the ii Labs. There won't be further updates to these pages. ] |
(Related publications: [PUBLink] [PUBLink])
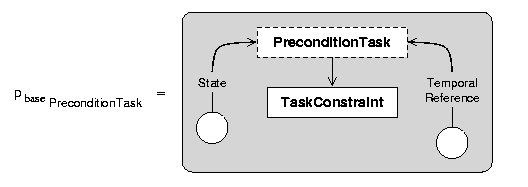
Besides Action Tasks, an action consists of Precondition Tasks and State Tasks (see figures below). The reason why State Tasks do not have to be linked to a Task Constraint will be explained later.
The Extensible Object Constraint Precondition Task
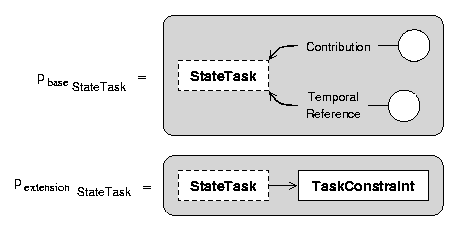
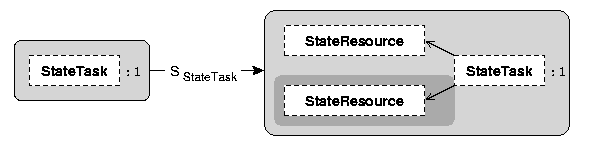
The Extensible Object Constraint State Task
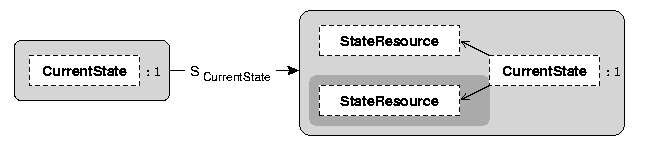
Unlike an action resource's structures, which are only internally represented in an ARC, a state resource's structures are explicitly stored in the model. This is because other constraints must access the state information as well (e.g., the Existence Constraint; see Section [Existence Projections]). Thus, Precondition Tasks and State Tasks are linked to a State Resource object constraint which specifies the property that is to be tested/changed. A State Resource object constraint relates Precondition Tasks and State Tasks to a ResourceType variable, a State Projection and a Current State (see following figure).
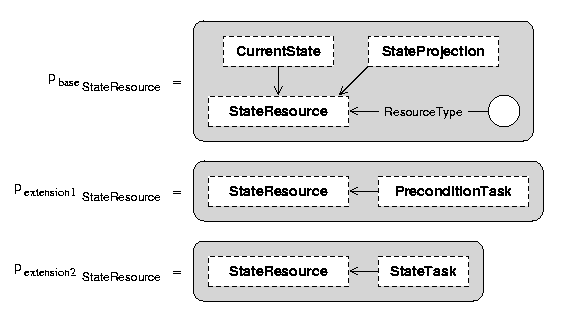
The Extensible Object Constraint State Resource
All Precondition Tasks and State Tasks are required to be connected to exactly one State Resource (see figures below).
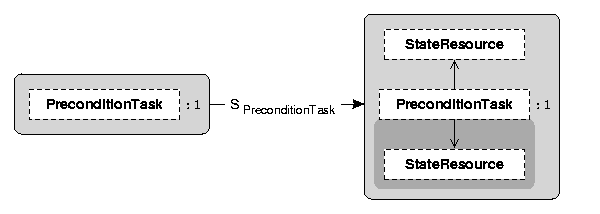
The Structural Constraint Precondition Task
The Structural Constraint State Task
The Current State references a variable (see following figure) that contains the State Resource's state at the Current Time.
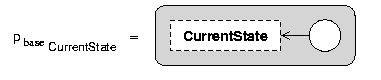
The Extensible Object Constraint Current State
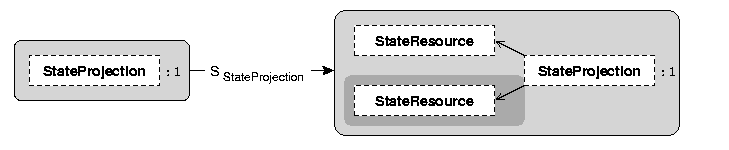
The State Projection references a variable (see figure below) that stores the temporal projection of the resource's state for the whole timeline.

The Extensible Object Constraint State Projection
Both, the Current State and the State Projection, must be connected to exactly one State Resource (see following figures).
The Structural Constraint Current State
The Structural Constraint State Projection
A State Resource Constraint (SRC) is linked to the State Resource to ensure a correct State Projection (see figure below). The SRC uses the State Resource's Current State and the Contributions of the State Resource's State Tasks to project the property's state development according to the State Tasks' TemporalReferences on a timeline, which is stored in the State Projection's variable. The constraint's costs are computed according to satisfaction of the assigned precondition tests.
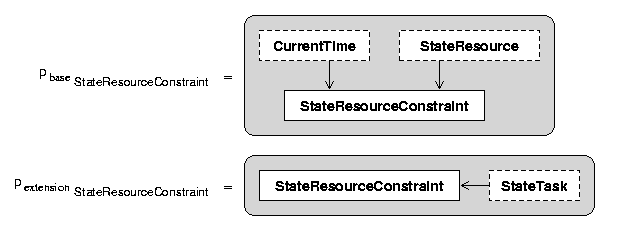
The Extensible Conventional State Resource Constraint
The structural constraint of the following figure ensures that each State Resource is connected to exactly one Object and that an SRC is connected. Although it is not necessary that all ResourceType variables of the State Resources have different values, this facilitates searching, e.g., for all Nutritive Value State Resources of the current plan. For this purpose, all ResourceType variables must be connected to an All Different constraint.
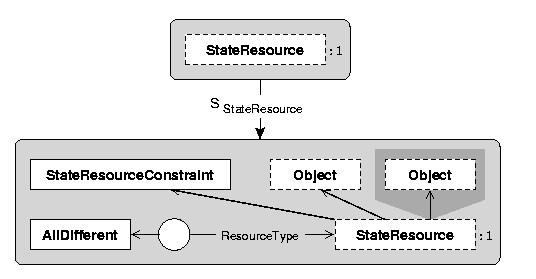
The Structural Constraint State Resource
The SRC is also responsible for maintaining the dependency effects of the resource's state development. To accomplish this, State Tasks can be connected to an SRC. Thus, a State Task must either be connected to exactly one State Resource Constraint or one Task Constraint. This is ensured by the structural constraint of the following figure (together with the structural Task Constraint). A configuration of an SRC's State Tasks that does not represent the correct dependency effects has an impact on the value of the SRC's cost function.
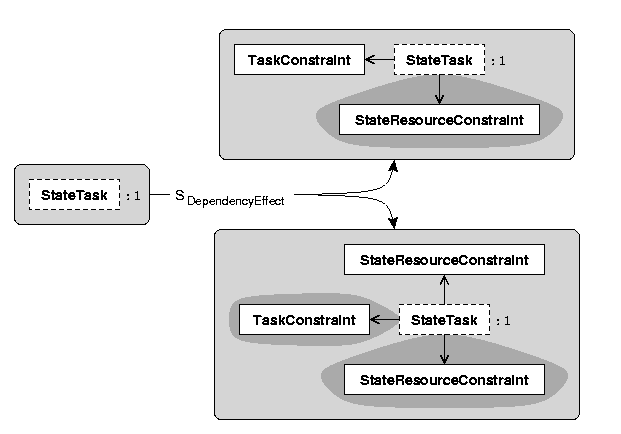
The Structural Constraint Dependency Effect
| [PLANNING AS SCSP] | [Time] [Actions] [Operations] [States] [Objects] [References] [Sensors] [Existence] [Correctness] [Formulation] |
For questions, comments or suggestions, please contact us.
Last update:
May 20, 2001 by Alexander Nareyek